Pneumatikus pozícionáló rendszerek
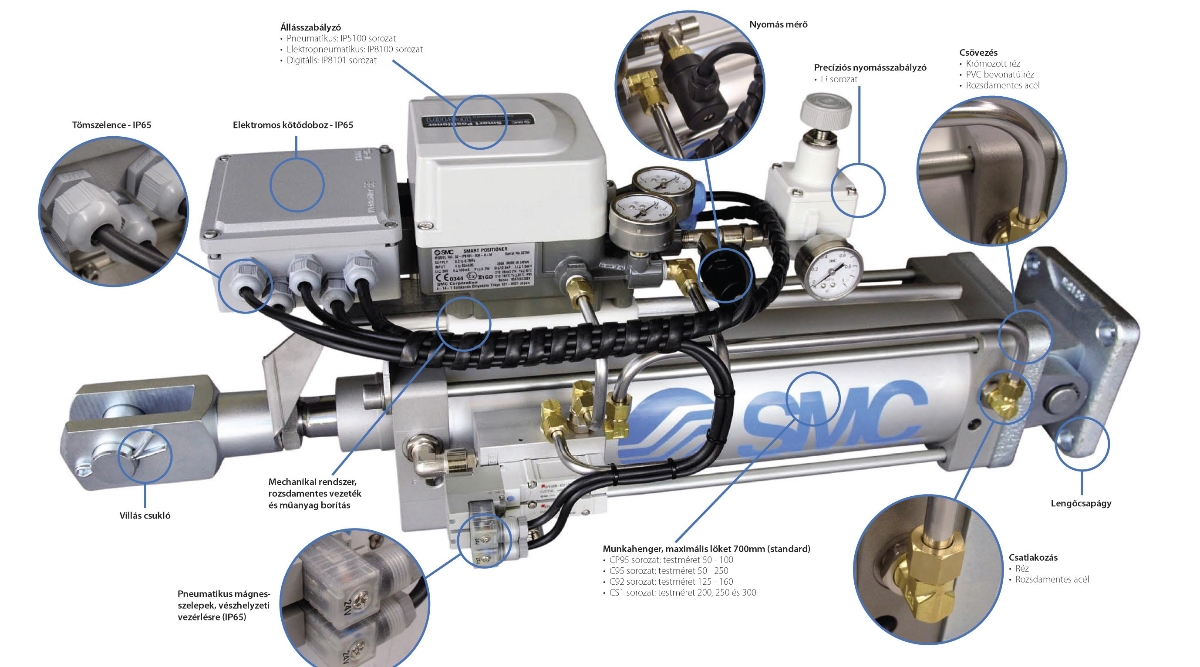
Az utóbbi években a legtöbb mérnök egyetért abban, hogy a fokozottabb megbízhatósági és nagyobb pontossági követelmények betartása mellett a gépek méretei csökkennek. És az ipar kívánalmainak megfelelően, még pontosabb szabályozást igényelnek a lineáris és forgó végrehajtók. Az SMC kutatási és fejlesztési csapata, a világ vezető automatizálási szakértői ismét ajánlanak egy tökéletes megoldást, az IP elektro-pneumatikus pozícionáló sorozatot. Ipari felhasználásra tervezett, nem robbanásveszélyes, akár egyszeres vagy kettős működtetésű hengerekhez. Ez az elektronikusan vezérelt pneumatikus pozícionáló, elérhető kimeneti csatlakozási opcióval, lehetővé téve a távoli működtetést és pozíció ellenőrzést. Természetesen ATEX változatot is kínál az SMC új sorozata.
A mai fejlett és folyamatosan további fejlődést mutató gyártás-automatizálás területén, egyre nagyobb az igény, az alkalmazások megoldásainak optimalizálására. Ez az optimalizáció főként gazdasági okokra vezethető vissza. Az ipari automatizálás által megalkotott számtalan berendezést, három alapvető energia szolgálhatja ki. Az elektromosság, a pneumatika és a hidraulika. Mindegyik területnek megvannak a maga előnyei és hátrányai, éppen ezért csak ritkán alkalmazzuk különállóan őket, inkább együttesen használjuk úgy, hogy az egyes előnyök domináljanak. A döntő előny pedig – a pontos precíz működés és hosszú élettartam mellet – a bekerülési költség.

Az olyan esetekben, mint például a nagy ellenállással áramló (nagy sűrűségű) közegek átáramlásának szabályozásában fontos, hogy erős ugyanakkor pontos és mindemellett viszonylagosan olcsó kombinációt alkalmazzunk. A nagy nyomatékú elektromos hajtások költsége, a hidraulikus rendszerek kiépítésének problémái és a pneumatika összenyomhatóságából adódó pozícionálási nehézségek között kell mérlegelni és kiválasztani az ideális megoldást. Erre nyújt lehetőséget az SMC által kifejlesztett SMART POSITIONER - Elektropneumatikus állásszabályzó család.


A levegő összenyomhatóságából fakadó problémák a pneumatikus szervó-technikával már bebizonyítottan a minimális szintre csökkenthetők. A megfelelő működés, a pontos és gyors visszajelzésen alapszik. Még a vezérlő berendezésekben nincs folyamatos visszacsatolás (ami a vezérlés nyílt hatásláncából is látható), addig a smart positioner család egy állandó monitor-jel után korrigál és így egy pontos szabályzó berendezést testesít meg. A működését vizsgálva gyönyörűen tükröződnek az irányítástechnika törvényszerűségei, szabályai és egységei.
Működése
Amikor a bemeneti áram növekszik, akkor az, a (8) vezérlőegységen keresztül gerjeszti a (12) tekercset. A tekercs mágneses terének változásával arányosan a (13) armatúra felveszi az új pozícióját, elmozdulva a (11) laprugó által biztosított alaphelyzetéből. Ennek eredményeként a (6) fúvóka és (5) torlólemez távolsága növekedni fog, és így a fúvóka torlónyomása csökken. Ennek hatására a vezérlőtolattyú az (1) működtető szelepben jobbra mozdul, ezzel az (OUT1) kimeneti nyomás növekszik és az (OUT2) kimeneti nyomás csökken, ami a (14) pneumatikus hajtást kényszeríti elmozdulásra. A vezérlőtolattyú mozgásának oka a lecsökkent nyomás a működtető szelep jobbszélső membránjának jobb oldalán. A pneumatikus hajtás elmozdulása a (10) mérőtengelyre kapcsolt (9) szögérzékelő szögelfordulását eredményezi, akár direkt (tengelykapcsoló) akár indirekt (vezérlőpálya) módon. A szögérzékelőtől kapott jel alapján a vezérlőegység folyamatosan korrigálja a tekercs gerjesztési áramát, így valósul meg a teljes szabályozási kör.
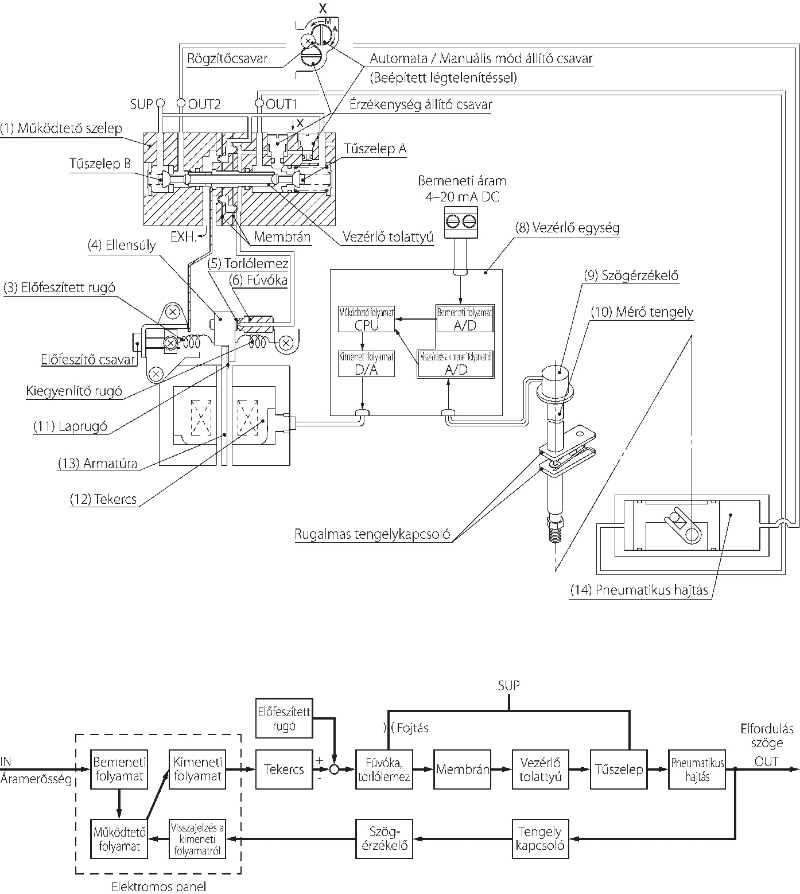
A SMART POSITIONER a szabályozóberendezés. A szabályozott berendezésre ajánlást a képeken látható alkalmazási példák adnak. Jelen esetben egy olyan kört ábrázolunk, amikor a pozícionáló által kiadott módosított jellemző egy elfordulási szög, ami egy csővezetékben lévő pillangószelep, mint szabályozott berendezés nyitásáért vagy zárásáért felel, amellyel az átáramló mennyiséget, mint szabályozott jellemzőt állítjuk be.
Ha sorban haladva megvizsgáljuk először a vezérlő egység feladatát, amely összehasonlítja a szögérzékelőtől, mint érzékelőszervtől érkező információt a bemeneti árammal, mint alapjelképző szervvel beállított alapjelünkkel, felismerhetők az irányítástechnika részműveletei is. A “bemeneti folyamat A/D” és a “visszajelzés a kimeneti folyamatról A/D” egységek testesítik meg a szögérzékelő és a bemeneti áram alapján az érzékelés részműveletét. Az ítéletalkotást a “működtető folyamat CPU” valósítja meg, míg a rendelkezést a “Kimeneti folyamat A/D” egység biztosítja. Azaz a vezérlő egység a szabályozási kör működési vázlatában a különbségképző szervnek felel meg.
Továbbhaladva, a vezérlő egység által kiadott rendelkezőjelnek megfelelően, a tekercs az armatúrával módosítja a torlólemez – fúvóka viszonyát. Így a laprugóval, előfeszített és kiegyenlítő rugókkal együtt, közösen alkotják a jelformáló szervet. A torlólemez – fúvóka kapcsolat adja a proporcionális (arányos) tagot. A köztük lévő távolság növekedésével arányosan csökken a fúvókaági nyomás.
A differenciáló tagot a működtető szelep membránjai adják, amelyek a szelepen belüli nyomáskülönbségek szerint változtatják alakjukat. A működtető szelep nem más, mint az erősítő szerv, mivel fúvókától visszaérkező alacsony torlónyomás mértékétől függően szabályozza a tápláló magas működtető nyomás elosztását az OUT1 és OUT2 kimenetek között, amely nem más, mint a végrehajtójel. Itt fontos kitérni az érzékenység állító csavar, valamint az automata/manuális mód állító csavar szerepére. Az érzékenység állító csavar tulajdonképpen egy fojtás, amely a fúvóka légáramát állítja be, amivel finomíthatunk vagy feszíthetünk a működtető szelep reagálási pontosságán, azaz ez az elem tölti be az integrálótag szerepét. Az automata/manuális állítási lehetőségnél a manuális állásban, leállítjuk a szabályozást, mivel a szabadba kilevegőzik a működtető szelepen a tápláló nyomás.
A következő részegység a végrehajtó szerv, azaz a pneumatikus hajtás. A működtető szelep által kiadott OUT1 és OUT2 nyomások határozzák meg a hengerben a dugattyú helyzetét, amely a beavatkozójelet testesíti meg.
A dugattyú által mozgatott tengely, amelyhez tengelykapcsolóval kapcsolódik a mérőtengely és a szögérzékelő, nem más, mint a pillangószelep forgástengelye és egyben a beavatkozó szerv.
Az IP8101 szabályozási köréről tehát megállapítható, hogy az arányos csatorna a reagálási gyorsaságot az integráló a pontosságot, a differenciáló pedig a szabályozni kívánt jellemzőnk változásának gyorsaságát biztosítja.
Ezek alapján felrajzolható a pozícionáló teljes szabályozási körének működési vázlata is, mely a szerkezeti ábra alatt látható.
2020. jan. 1.




