Werkzeug-Tausendsassa: Multi-Hand-Adapter der Serie RMMA macht Roboter multifunktionell
Industrie- wie kollaborative Roboter (Cobots) gehören in vielen Bereichen mittlerweile zum unverzichtbaren Bestandteil von Produktionsprozessen. Doch sie sind nur so gut, wie die an ihnen angebrachten End-of-Arm-Tools (EoATs), mit denen sie bestimmte Aufgaben erledigen: von Pick-and-Place über Palettierung und Befüllung bis hin zum Bekleben. Damit ein einzelner Roboter mehrere Arbeitsschritte ohne Austausch des EoATs ausführen kann, hat SMC den Multi-Hand-Adapter der Serie RMMA entwickelt: Daran lassen sich bis zu drei verschiedene EoATs anbringen, zwischen denen etwa ein Cobot während des automatisierten Prozesses wechseln kann. So können entweder mehrere Werkstücke gleichzeitig bewegt werden oder ein Cobot mehrere Arbeitsgänge nacheinander ausführen.
Ob es um das Handling von Folienverpackungen geht, das Befüllen von Beuteln oder Taschen oder klassische Pick-and-Place-Anwendungen: Mit geeigneten End-of-Arm-Tools werden Cobots zu den idealen Helfern bei unterschiedlichsten Prozessen. Um die Zykluszeit zu reduzieren und so die Produktivität deutlich zu steigern, hat der Automatisierungsspezialist SMC jetzt den Multi-Hand-Adapter der Serie RMMA entwickelt. Mit seiner Hilfe lassen sich bis zu drei verschiedene EoATs an einem einzigen Roboterarm anbringen. So gelingt es, dass ein einzelner Roboter mehrere Werkstücke gleichzeitig bewegen oder verschiedene Arbeitsschritte nacheinander durchführen kann – statt zwei oder drei Cobots wird so nur noch einer für dieselbe Aufgabe benötigt. Dank Standardflansch, unterschiedlichen Montagewinkeln und einfacher Montage in kürzester Zeit bietet die Serie RMMA ein zusätzliches Höchstmaß an Flexibilität.
Variantenreich und schnell einsatzbereit
Der Multi-Hand-Adapter hat die Form eines Trapezes mit zwei abgerundeten und einer flachen Kante. In der ersten Ausführung ergeben die gegenüberliegenden Schenkel einen Winkel von 90° und in der zweiten Ausführung einen Winkel von 120°. Zwei 90°-Ausführungen lassen sich zudem miteinander verbinden, wodurch die gegenüberliegenden äußeren Schenkel einen Winkel von 180° ergeben. So lassen sich bei den 90°- und 120°-Ausführungen zwei und bei der 180°-Ausführung sogar drei End-of-Arm-Tools anbringen. Dank Bohrungen auf den drei großen Oberflächen kann der Roboterarm mittels vier Schrauben über eine Haupt- und eine Werkzeugplatte (jeweils als Bestelloption) mit der Serie RMMA verbunden werden, um einen sicheren Halt zu gewährleisten. So sind für das Anbringen der EoATs verschiedene Winkel- und Werkzeugkombinationen für unterschiedliche Anwendungsfälle möglich.
Für den Werkzeugwechsel müssen lediglich zwei Klemmzylinderschrauben ab- bzw. angeschraubt werden. Dank des Standard-Roboterflansches nach ISO9409-1-50-4-M6 ist kein zusätzlicher Adapterflansch zur Montage mit einem Roboter für die Serie RMMA mit einem EoAT nötig. Anwender können bei der Verwendung der Serie RMMA daher ohne zusätzlichen Aufwand auf eine Vielzahl an EoATs zurückgreifen. Ebenfalls vier Klemmzylinderschrauben dienen dazu, zwei 90°-Ausführungen des Multi-Hand-Adapters miteinander zu verbinden. Alle drei Kombinationen sind für eine maximale Arbeitslast von 20 kg und einen Belastungs- und Drehmoment-Widerstand von jeweils 60 Nm geeignet. Selbst mit Werkzeug- und Hauptplatte bringt die Serie RMMA bei der 120°-Ausführung ein Gewicht von nur 550 g inklusive der Schrauben und des Zylinderstiftes auf die Waage. Vor der Inbetriebnahme müssen nur noch die Anschlusskabel der zwei bzw. drei Greifer mit einem I/O-Terminal verbunden werden.
Bis zu drei in einem
Durch die unterschiedlichen Winkel- und Werkzeugkombinationen und das Anbringen von bis zu drei EoATs kann nun ein einzelner Cobot Anwendungen mit unterschiedlichen Anforderungen durchführen, für die zuvor drei verschiedene Cobots notwendig gewesen wären. So lassen sich beispielsweise ein 2-Finger-Greifer, mit einem 3-Finger-Greifer und einem Vakuum-Greifer kombinieren, um zwischen diesen während eines Vorgangs zu wechseln und selbst komplexe Prozesse mit nur einem Roboter durchzuführen. Werden etwa zwei oder drei Vakuum-Greifer angeschlossen, kann parallel die gleiche Anzahl an Werkstücken transportiert werden. Geeignet für eine Betriebstemperatur von -10 bis 60 °C lässt sich mittels des Multi-Hand-Adapters der Serie RMMA eine Vielzahl an verschiedenen Aufgaben erledigen. Die Folge: kürzere Zykluszeiten, weniger Kosten, ein geringerer Montage- und Wartungsaufwand und schließlich höhere Produktivität.
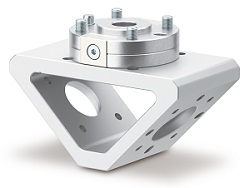
Abbildung: Der Multi-Hand-Adapter der Serie RMMA (hier in der 90°-Ausführung inkl. Haupt- und Werkzeugplatte) ermöglicht einzeln oder miteinander verbunden verschiedene Winkel- und Werkzeugkombinationen, um bis zu drei End-of-Arm-Tools an einen Roboter anzuschließen.
Foto: SMC Deutschland GmbH
Mehr über SMC Deutschland
Ihr Pressekontakt: Fabienne Vogt
28.08.2024




